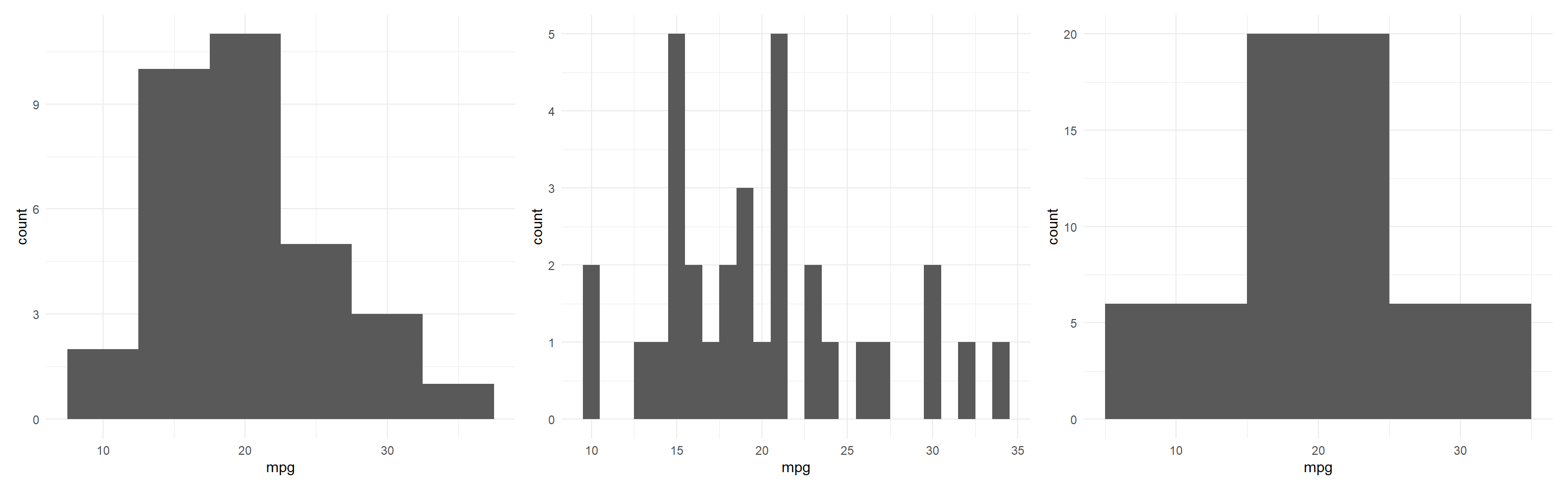
Histogram binwidth
- Binwidth has nothing to do with bandwidth in Kernel density.
- Binwidth simply controls for the size of breaks in the histogram.
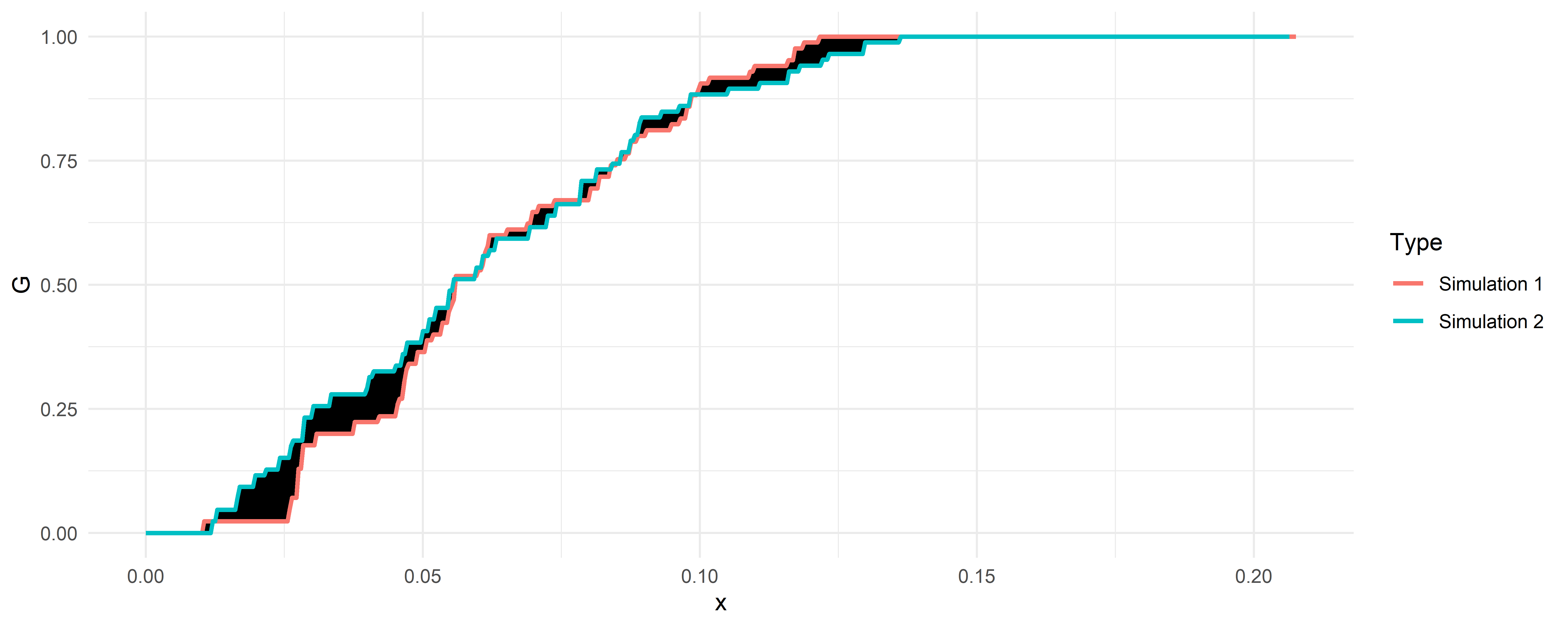
Simulation to obtain a confidence interval
Given the challenge of solving for the standard deviations of test statistics, we employ simulations to derive a confidence interval.