Spatially continuous data
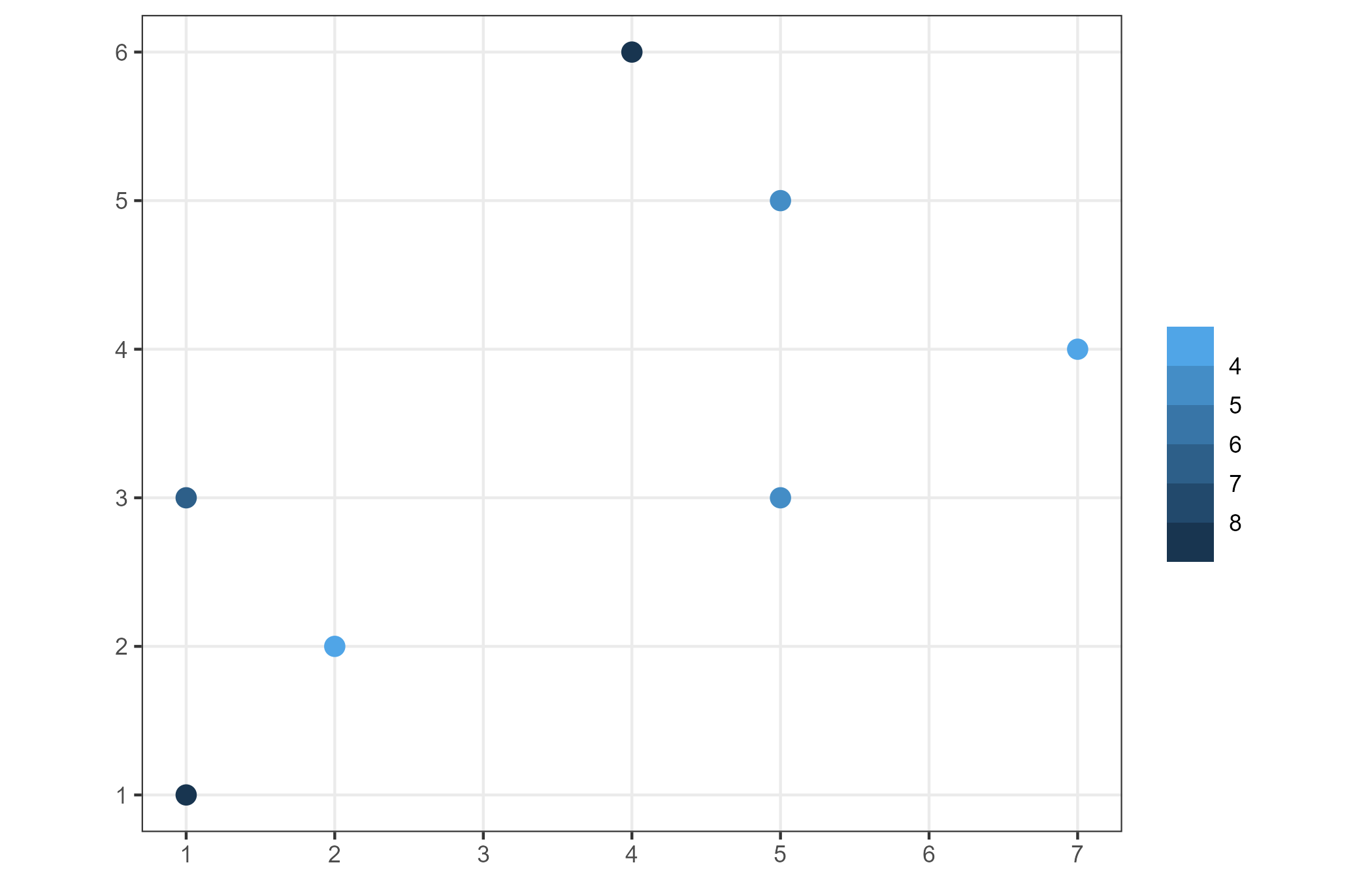
- Here, each point represents a measurement of the underlying continuous process, rather than a discrete event.
- The methods we’ll discuss this week are specific to continuous data and are not suitable for point pattern analysis, and vice versa.
Motivation for spatial interpolation
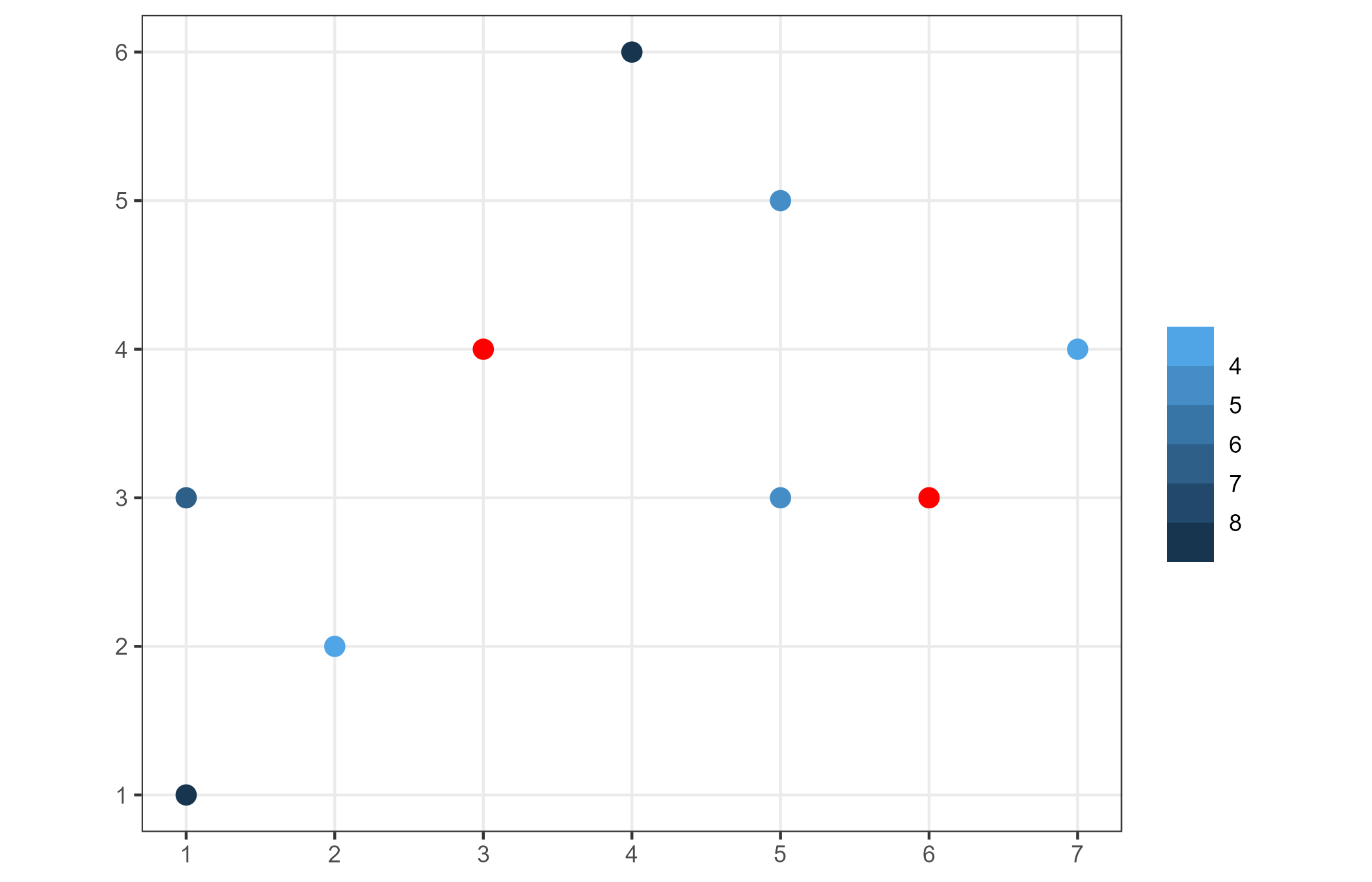
- Since it is impossible to observe an entire continuous process, there are infinitely many points that remain unobserved.
- To understand the process at a specific, unknown location, we aim to estimate its value based on available data.
- Spatial interpolation techniques address this challenge by providing methods to predict values at these unmeasured points.
Point estimate and uncertainty
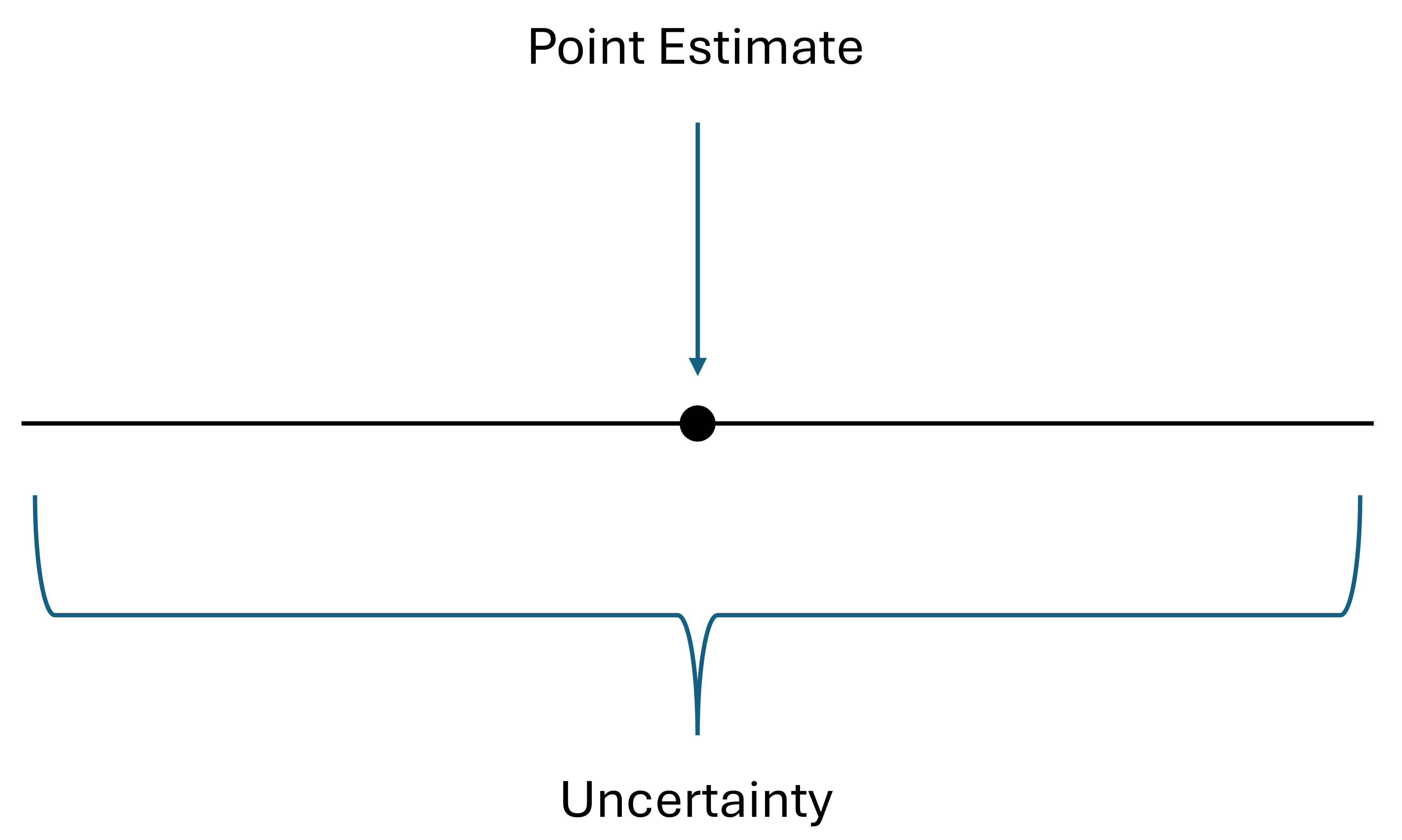
The theoretical spatial continuous process: \(z_i = f(u_i, v_i) + \epsilon_i\)
Where \(\hat{f}(u_i, v_i)\) represents the point estimate for location \(i\).
Uncertainty is the interval that is likely to capture the true value, \(z_i\).
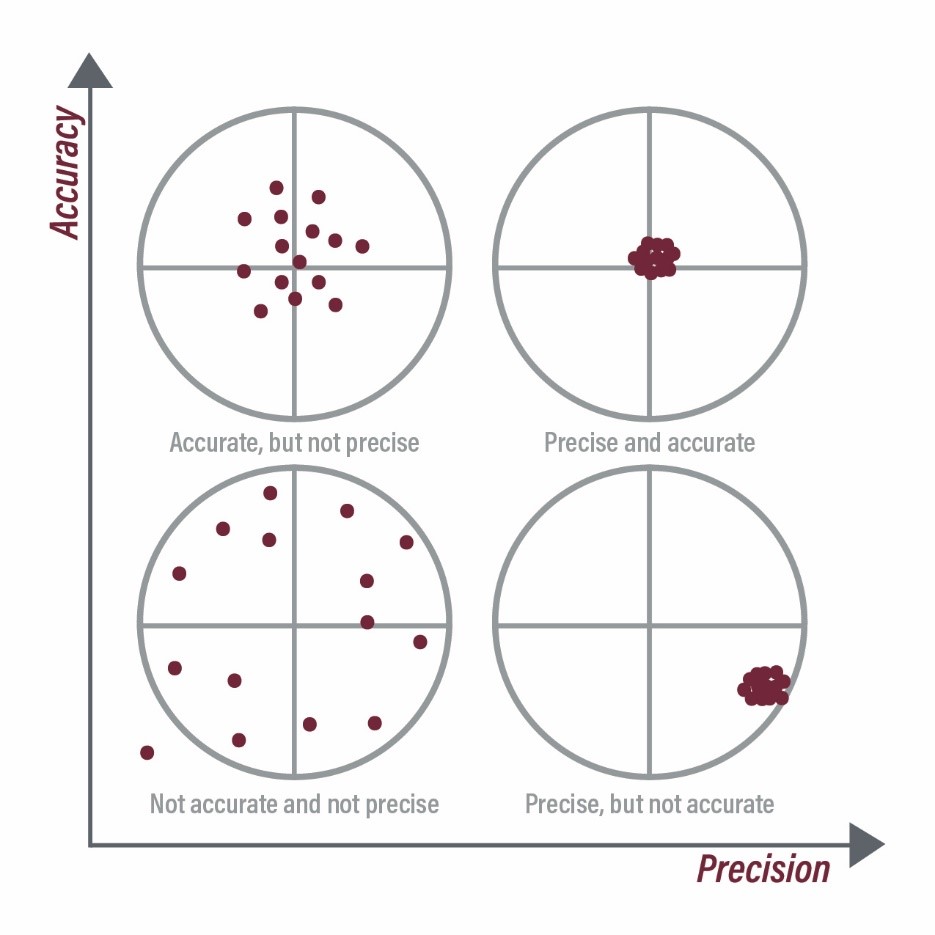
Accuracy and precision